Rover controllata via internet
Descrizione
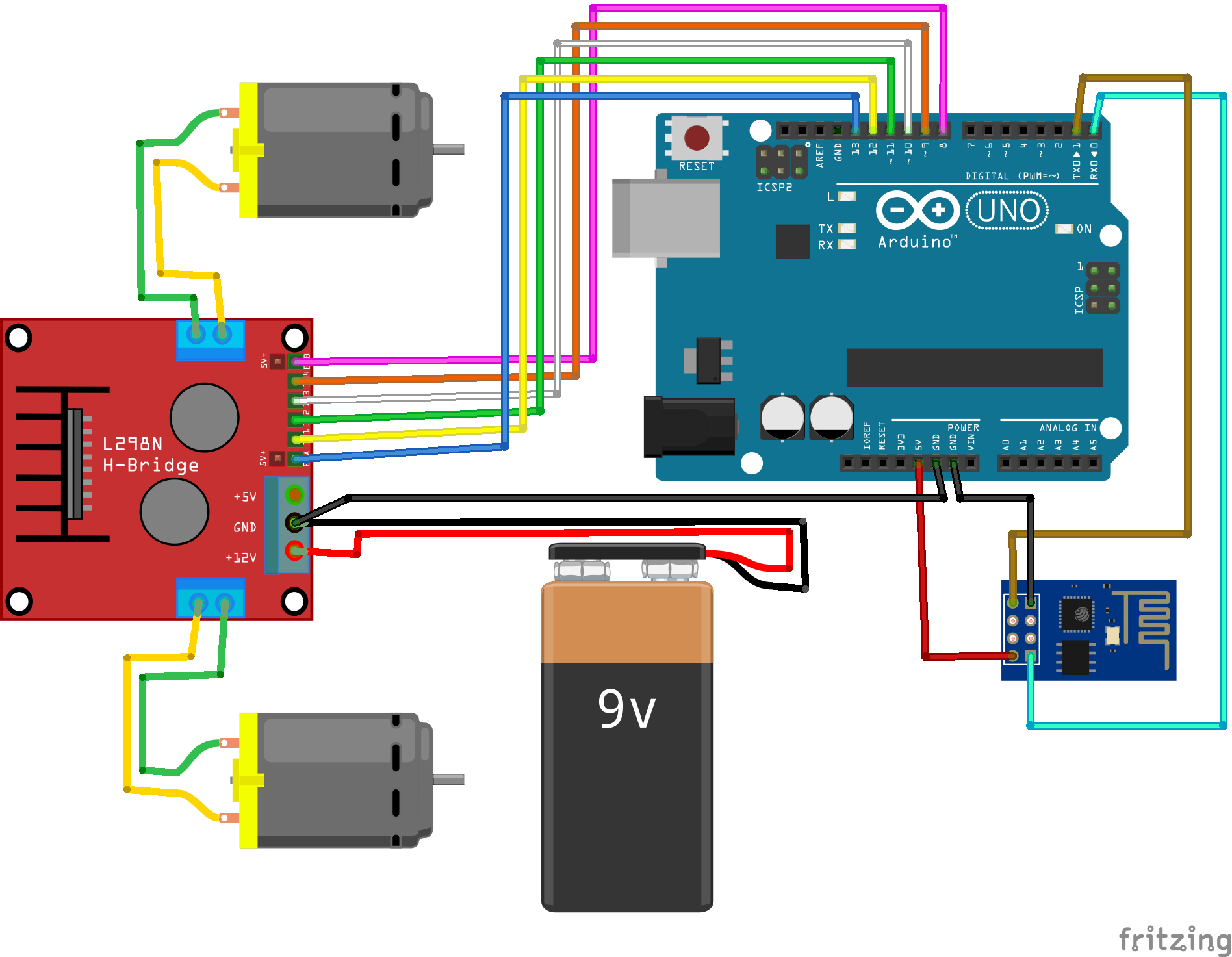
Grazie all’applicazione Blynk siamo riusciti a comandare un rover, costruito con due motori collegati al ponte L298N ed alimentato da una powerback.
Gruppo di lavoro
- Iodice Michele
- Lovreglio Giuseppe
Componenti
- Scheda Arduino Uno
- Motori x2
- modulo L298N
- Cavetti di collegamento
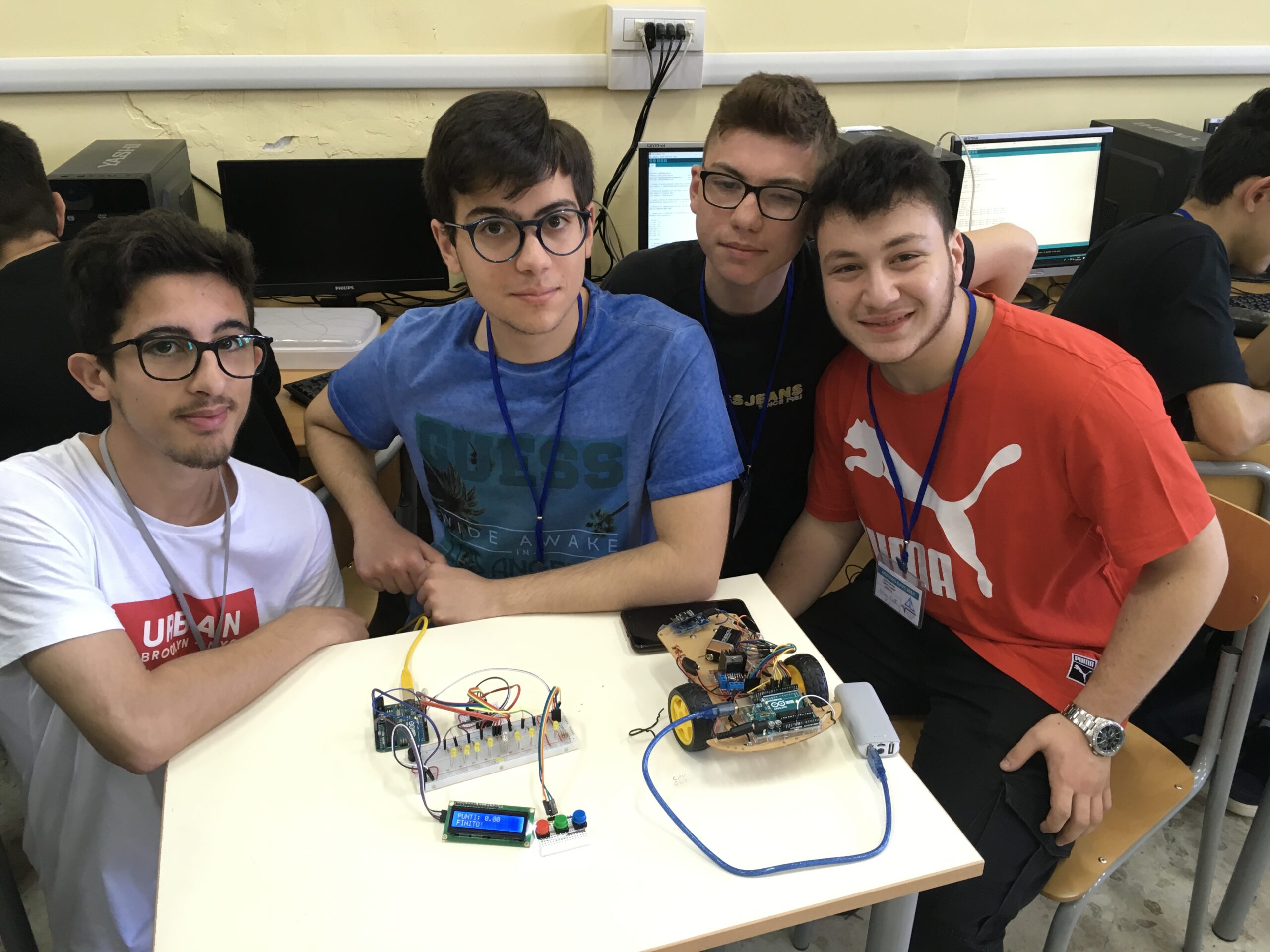
Galleria fotografica
Schema elettrico